Turvavalopuomin/-verhon asennusetäisyyden määrittäminen
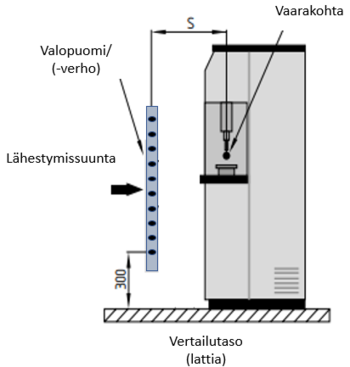
Standardi EN ISO 13855:2010 (Koneturvallisuus. Suojausteknisten laitteiden sijoitus ottaen huomioon kehon osien lähestymisnopeus) määrittää mm. turvavaloverhojen vähimmäisetäisyyden vaarakohtaan nähden. Vähimmäistäisyys lasketaan seuraavalla kaavalla:
S = K x T + C
missä;
- K = henkilön tai ruumiinosan lähestymisnopeusvakio, joka valitaan sen mukaan mille etäisyydelle turvalaite asennetaan vaarakohdasta
- 2 000 mm/s jos turvalaite on ≤ 500 mm etäisyydellä
- 1 600 mm/s jos turvalaite on > 500 mm etäisyydellä
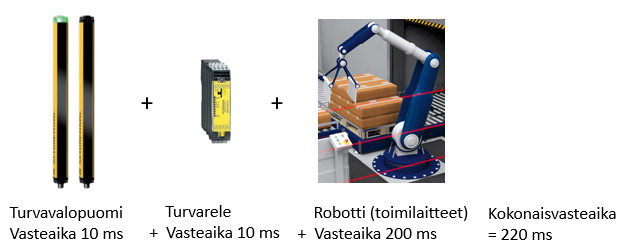
- T = kokonaispysähtymisaika (turvalaitteen-, siirtoväylän-, logiikkayksikön- ja koneen yhteen laskettu vasteaika)
- C = lähestymisetäisyys (lisäetäisyys)
- Lisäetäisyys määräytyy turvalaitteen havaitsemiskyvystä (resoluutio) tai ylimmän säteen yli ulottumisen tuomasta etäisyydestä sen mukaan kumpi arvo on suurempi
- Lisätäisyys resoluution kautta:
- C = 850 mm (2- ja useampisäteiset valoaidat ja valoverhot joiden resoluutio d on > 40 mm)
- C = 8 x (d-14) mm, kuitenkin vähintään 100 mm (valoverhot joiden resoluutio d on ≤ 40 mm)
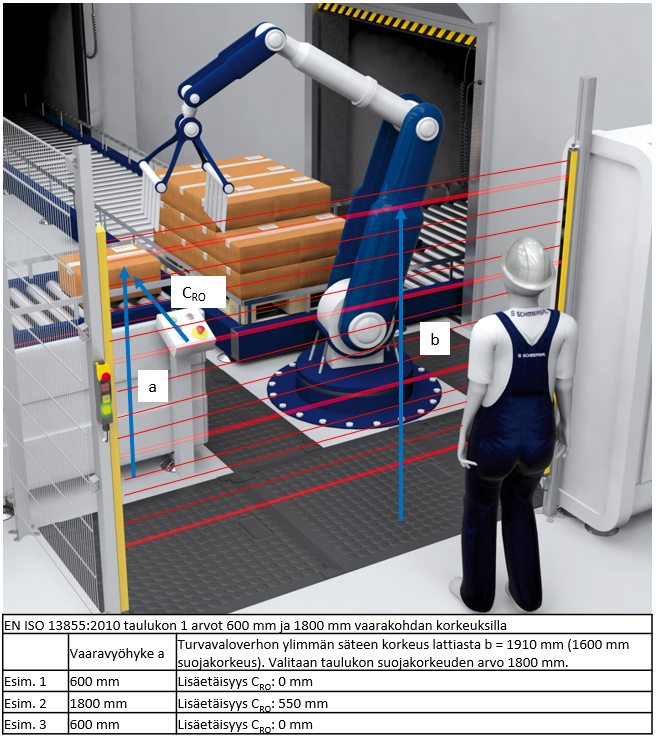
- Lisäetäisyys yli ulottumisen kautta
- Taulukko 1 standardista EN ISO 13855:2010